Valeurs manquantes et factorisation de matrices#
Links: notebook, html, PDF, python, slides, GitHub
Réflexion autour des valeur manquantes et de la factorisation de matrice positive.
from jyquickhelper import add_notebook_menu
add_notebook_menu()
%matplotlib inline
Matrice à coefficients aléatoires#
On étudie la factorisation d’une matrice à coefficients tout à fait
aléatoires qui suivent une loi uniforme sur l’intervalle ![[0,1]](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0nMS4wJyBlbmNvZGluZz0nVVRGLTgnPz4KPCEtLSBUaGlzIGZpbGUgd2FzIGdlbmVyYXRlZCBieSBkdmlzdmdtIDIuNi4xIC0tPgo8c3ZnIGhlaWdodD0nMTEuOTU1MTY4cHQnIHZlcnNpb249JzEuMScgdmlld0JveD0nMzguODU0Mjk2IDU2Ljc4NzA0OSAyMy40NTM0NjIgMTEuOTU1MTY4JyB3aWR0aD0nMjMuNDUzNDYycHQnIHhtbG5zPSdodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZycgeG1sbnM6eGxpbms9J2h0dHA6Ly93d3cudzMub3JnLzE5OTkveGxpbmsnPgo8ZGVmcz4KPHBhdGggZD0nTTIuMzMxMjU4IDAuMDQ3ODIxQzIuMzMxMjU4IC0wLjY0NTU3OSAyLjEwNDExIC0xLjE1OTY1MSAxLjYxMzk0OCAtMS4xNTk2NTFDMS4yMzEzODIgLTEuMTU5NjUxIDEuMDQwMSAtMC44NDg4MTcgMS4wNDAxIC0wLjU4NTgwM1MxLjIxOTQyNyAwIDEuNjI1OTAzIDBDMS43ODEzMiAwIDEuOTEyODI3IC0wLjA0NzgyMSAyLjAyMDQyMyAtMC4xNTU0MTdDMi4wNDQzMzQgLTAuMTc5MzI4IDIuMDU2Mjg5IC0wLjE3OTMyOCAyLjA2ODI0NCAtMC4xNzkzMjhDMi4wOTIxNTQgLTAuMTc5MzI4IDIuMDkyMTU0IC0wLjAxMTk1NSAyLjA5MjE1NCAwLjA0NzgyMUMyLjA5MjE1NCAwLjQ0MjM0MSAyLjAyMDQyMyAxLjIxOTQyNyAxLjMyNzAyNCAxLjk5NjUxM0MxLjE5NTUxNyAyLjEzOTk3NSAxLjE5NTUxNyAyLjE2Mzg4NSAxLjE5NTUxNyAyLjE4Nzc5NkMxLjE5NTUxNyAyLjI0NzU3MiAxLjI1NTI5MyAyLjMwNzM0NyAxLjMxNTA2OCAyLjMwNzM0N0MxLjQxMDcxIDIuMzA3MzQ3IDIuMzMxMjU4IDEuNDIyNjY1IDIuMzMxMjU4IDAuMDQ3ODIxWicgaWQ9J2cwLTU5Jy8+CjxwYXRoIGQ9J001LjM1NTkxNSAtMy44MjU2NTRDNS4zNTU5MTUgLTQuODE3OTMzIDUuMjk2MTM5IC01Ljc4NjMwMSA0Ljg2NTc1MyAtNi42OTQ4OTRDNC4zNzU1OTIgLTcuNjg3MTczIDMuNTE0ODE5IC03Ljk1MDE4NyAyLjkyOTAxNiAtNy45NTAxODdDMi4yMzU2MTYgLTcuOTUwMTg3IDEuMzg2OCAtNy42MDM0ODcgMC45NDQ0NTggLTYuNjExMjA4QzAuNjA5NzE0IC01Ljg1ODAzMiAwLjQ5MDE2MiAtNS4xMTY4MTIgMC40OTAxNjIgLTMuODI1NjU0QzAuNDkwMTYyIC0yLjY2NjAwMiAwLjU3Mzg0OCAtMS43OTMyNzUgMS4wMDQyMzQgLTAuOTQ0NDU4QzEuNDcwNDg2IC0wLjAzNTg2NiAyLjI5NTM5MiAwLjI1MTA1OSAyLjkxNzA2MSAwLjI1MTA1OUMzLjk1NzE2MSAwLjI1MTA1OSA0LjU1NDkxOSAtMC4zNzA2MSA0LjkwMTYxOSAtMS4wNjQwMUM1LjMzMjAwNSAtMS45NjA2NDggNS4zNTU5MTUgLTMuMTMyMjU0IDUuMzU1OTE1IC0zLjgyNTY1NFpNMi45MTcwNjEgMC4wMTE5NTVDMi41MzQ0OTYgMC4wMTE5NTUgMS43NTc0MSAtMC4yMDMyMzggMS41MzAyNjIgLTEuNTA2MzUxQzEuMzk4NzU1IC0yLjIyMzY2MSAxLjM5ODc1NSAtMy4xMzIyNTQgMS4zOTg3NTUgLTMuOTY5MTE2QzEuMzk4NzU1IC00Ljk0OTQ0IDEuMzk4NzU1IC01LjgzNDEyMiAxLjU5MDAzNyAtNi41Mzk0NzdDMS43OTMyNzUgLTcuMzQwNDczIDIuNDAyOTg5IC03LjcxMTA4MyAyLjkxNzA2MSAtNy43MTEwODNDMy4zNzEzNTcgLTcuNzExMDgzIDQuMDY0NzU3IC03LjQzNjExNSA0LjI5MTkwNSAtNi40MDc5N0M0LjQ0NzMyMyAtNS43MjY1MjYgNC40NDczMjMgLTQuNzgyMDY3IDQuNDQ3MzIzIC0zLjk2OTExNkM0LjQ0NzMyMyAtMy4xNjgxMiA0LjQ0NzMyMyAtMi4yNTk1MjcgNC4zMTU4MTYgLTEuNTMwMjYyQzQuMDg4NjY3IC0wLjIxNTE5MyAzLjMzNTQ5MiAwLjAxMTk1NSAyLjkxNzA2MSAwLjAxMTk1NVonIGlkPSdnMS00OCcvPgo8cGF0aCBkPSdNMy40NDMwODggLTcuNjYzMjYzQzMuNDQzMDg4IC03LjkzODIzMiAzLjQ0MzA4OCAtNy45NTAxODcgMy4yMDM5ODUgLTcuOTUwMTg3QzIuOTE3MDYxIC03LjYyNzM5NyAyLjMxOTMwMyAtNy4xODUwNTYgMS4wODc5MiAtNy4xODUwNTZWLTYuODM4MzU2QzEuMzYyODg5IC02LjgzODM1NiAxLjk2MDY0OCAtNi44MzgzNTYgMi42MTgxODIgLTcuMTQ5MTkxVi0wLjkyMDU0OEMyLjYxODE4MiAtMC40OTAxNjIgMi41ODIzMTYgLTAuMzQ2NyAxLjUzMDI2MiAtMC4zNDY3SDEuMTU5NjUxVjBDMS40ODI0NDEgLTAuMDIzOTEgMi42NDIwOTIgLTAuMDIzOTEgMy4wMzY2MTMgLTAuMDIzOTFTNC41Nzg4MjkgLTAuMDIzOTEgNC45MDE2MTkgMFYtMC4zNDY3SDQuNTMxMDA5QzMuNDc4OTU0IC0wLjM0NjcgMy40NDMwODggLTAuNDkwMTYyIDMuNDQzMDg4IC0wLjkyMDU0OFYtNy42NjMyNjNaJyBpZD0nZzEtNDknLz4KPHBhdGggZD0nTTIuOTg4NzkyIDIuOTg4NzkyVjIuNTQ2NDUxSDEuODI5MTQxVi04LjUyNDAzNUgyLjk4ODc5MlYtOC45NjYzNzZIMS4zODY4VjIuOTg4NzkySDIuOTg4NzkyWicgaWQ9J2cxLTkxJy8+CjxwYXRoIGQ9J00xLjg1MzA1MSAtOC45NjYzNzZIMC4yNTEwNTlWLTguNTI0MDM1SDEuNDEwNzFWMi41NDY0NTFIMC4yNTEwNTlWMi45ODg3OTJIMS44NTMwNTFWLTguOTY2Mzc2WicgaWQ9J2cxLTkzJy8+CjwvZGVmcz4KPGcgaWQ9J3BhZ2UxJz4KPHVzZSB4PSczOC44NTQyOTYnIHhsaW5rOmhyZWY9JyNnMS05MScgeT0nNjUuNzUzNDI1Jy8+Cjx1c2UgeD0nNDIuMTA1OTU4JyB4bGluazpocmVmPScjZzEtNDgnIHk9JzY1Ljc1MzQyNScvPgo8dXNlIHg9JzQ3Ljk1ODk0OCcgeGxpbms6aHJlZj0nI2cwLTU5JyB5PSc2NS43NTM0MjUnLz4KPHVzZSB4PSc1My4yMDMxMDcnIHhsaW5rOmhyZWY9JyNnMS00OScgeT0nNjUuNzUzNDI1Jy8+Cjx1c2UgeD0nNTkuMDU2MDk3JyB4bGluazpocmVmPScjZzEtOTMnIHk9JzY1Ljc1MzQyNScvPgo8L2c+Cjwvc3ZnPg==) .
Essayons sur une petite matrice :
.
Essayons sur une petite matrice :
from numpy.random import rand
M = rand(3, 3)
M
array([[ 0.05119593, 0.43722929, 0.9290821 ],
[ 0.4588466 , 0.14187813, 0.23762633],
[ 0.9768084 , 0.47674026, 0.79044526]])
from sklearn.decomposition import NMF
mf = NMF(1)
mf.fit_transform(M)
array([[ 0.67825803],
[ 0.38030919],
[ 1.02295362]])
La matrice précédente est la matrice  dans le produit
dans le produit
 , la matrice qui suit est
, la matrice qui suit est  .
.
mf.components_
array([[ 0.73190904, 0.50765757, 0.92611883]])
mf.reconstruction_err_ / (M.shape[0] * M.shape[1])
0.07236890712696428
On recalcule l’erreur :
d = M - mf.fit_transform(M) @ mf.components_
a = d.ravel()
e = a @ a.T
e ** 0.5 / (M.shape[0] * M.shape[1])
0.072368907126964283
e.ravel()
array([ 0.42421796])
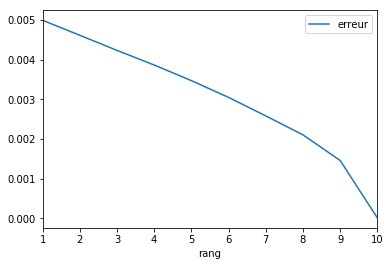
Et maintenant sur une grande et plus nécessairement carrée :
M = rand(300, 10)
mf = NMF(1)
mf.fit_transform(M)
mf.reconstruction_err_ / (M.shape[0] * M.shape[1])
0.004996164872801101
L’erreur est la même :
errs = []
rangs = list(range(1, 11))
for k in rangs:
mf = NMF(k)
mf.fit_transform(M)
e = mf.reconstruction_err_ / (M.shape[0] * M.shape[1])
errs.append(e)
import pandas
df = pandas.DataFrame(dict(rang=rangs, erreur=errs))
df.plot(x="rang", y="erreur")
<matplotlib.axes._subplots.AxesSubplot at 0x199924d8668>
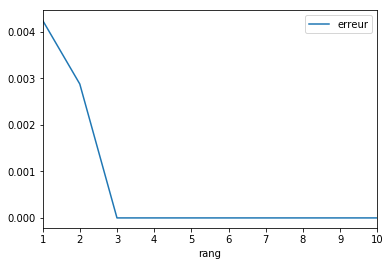
Matrice avec des vecteurs colonnes corrélés#
Supposons maintenant que la matrice précédente  est de rang 3.
Pour s’en assurer, on tire une matrice aléalatoire avec 3 vecteurs
colonnes et on réplique des colonnes jusqu’à la dimension souhaitée.
est de rang 3.
Pour s’en assurer, on tire une matrice aléalatoire avec 3 vecteurs
colonnes et on réplique des colonnes jusqu’à la dimension souhaitée.
from numpy import hstack
M = rand(300, 3)
M = hstack([M, M, M, M[:,:1]])
M.shape
(300, 10)
errs = []
rangs = list(range(1, 11))
for k in rangs:
mf = NMF(k)
mf.fit_transform(M)
e = mf.reconstruction_err_ / (M.shape[0] * M.shape[1])
errs.append(e)
import pandas
df = pandas.DataFrame(dict(rang=rangs, erreur=errs))
df.plot(x="rang", y="erreur")
<matplotlib.axes._subplots.AxesSubplot at 0x199925d6630>
On essaye à nouveausur une matrice un peu plus petite.
M = rand(3, 2)
M = hstack([M, M[:,:1]])
M
array([[ 0.27190312, 0.6497563 , 0.27190312],
[ 0.44853292, 0.87097224, 0.44853292],
[ 0.29424835, 0.65106952, 0.29424835]])
mf = NMF(2)
mf.fit_transform(M)
array([[ 0.61835197, 0. ],
[ 0.82887888, 0.29866219],
[ 0.61960446, 0.07743224]])
mf.components_
array([[ 0.43972536, 1.05078419, 0.43972536],
[ 0.28143493, 0. , 0.28143493]])
La dernière colonne est identique à la première.
Matrice identité#
Et maintenant si la matrice est la matrice identité, que se
passe-t-il ?
from numpy import identity
M = identity(3)
M
array([[ 1., 0., 0.],
[ 0., 1., 0.],
[ 0., 0., 1.]])
mf = NMF(1)
mf.fit_transform(M)
array([[ 0.],
[ 1.],
[ 0.]])
mf.components_
array([[ 0., 1., 0.]])
mf.reconstruction_err_ ** 2
2.0000000000000004
On essaye avec  .
.
mf = NMF(2)
mf.fit_transform(M)
array([[ 0. , 0. ],
[ 0. , 1.03940448],
[ 0.95521772, 0. ]])
mf.components_
array([[ 0. , 0. , 1.04688175],
[ 0. , 0.96208937, 0. ]])
mf.reconstruction_err_ ** 2
1.0
Avec des vecteurs normés et indépendants (formant donc une base de
l’espace vectoriel), l’algorithme aboutit à une matrice égale
au  premiers vecteurs et oublie les autres.
premiers vecteurs et oublie les autres.
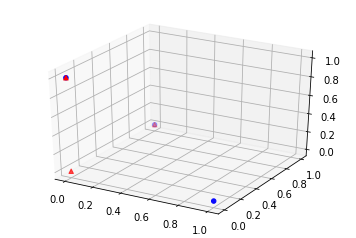
Matrice identité et représentation spatiale#
Pour comprendre un peu mieux ce dernier exemple, il est utile de chercher d’autres solutions dont l’erreur est équivalente.
def erreur_mf(M, W, H):
d = M - W @ H
a = d.ravel()
e = a @ a.T
e ** 0.5 / (M.shape[0] * M.shape[1])
return e
M = identity(3)
mf = NMF(2)
W = mf.fit_transform(M)
H = mf.components_
erreur_mf(M, W, H)
1.0
W
array([[ 0. , 0. ],
[ 0.9703523 , 0. ],
[ 0. , 1.02721047]])
H
array([[ 0. , 1.03055354, 0. ],
[ 0. , 0. , 0.97351032]])
W @ H
array([[ 0., 0., 0.],
[ 0., 1., 0.],
[ 0., 0., 1.]])
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
wh = W @ H
ax.scatter(M[:,0], M[:,1], M[:,2], c='b', marker='o', s=20)
ax.scatter(wh[:,0], wh[:,1], wh[:,2], c='r', marker='^')
<mpl_toolkits.mplot3d.art3d.Path3DCollection at 0x19992d2a5c0>
Et si on pose maintenant :
import numpy
W = numpy.array([[0.5, 0.5, 0], [0, 0, 1]]).T
H = numpy.array([[1, 1, 0], [0.0, 0.0, 1.0]])
W
array([[ 0.5, 0. ],
[ 0.5, 0. ],
[ 0. , 1. ]])
H
array([[ 1., 1., 0.],
[ 0., 0., 1.]])
W @ H
array([[ 0.5, 0.5, 0. ],
[ 0.5, 0.5, 0. ],
[ 0. , 0. , 1. ]])
erreur_mf(M, W, H)
1.0
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
wh = W @ H
ax.scatter(M[:,0], M[:,1], M[:,2], c='b', marker='o', s=20)
ax.scatter(wh[:,0], wh[:,1], wh[:,2], c='r', marker='^')
<mpl_toolkits.mplot3d.art3d.Path3DCollection at 0x19992a2e5f8>
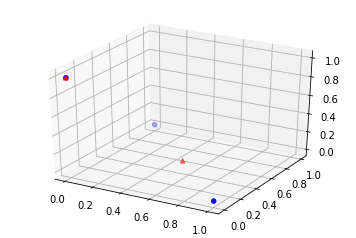
On peut voir la matrice comme un ensemble de  points
dans un espace vectoriel. La matrice est un ensemble de
points
dans un espace vectoriel. La matrice est un ensemble de
 points dans le même espace. La matrice , de rang
est une approximation de cet ensemble dans le même espace,
c’est aussi combinaisons linéaires de points de
façon à former points les plus proches proches de
points de la matrice .
points dans le même espace. La matrice , de rang
est une approximation de cet ensemble dans le même espace,
c’est aussi combinaisons linéaires de points de
façon à former points les plus proches proches de
points de la matrice .